预紧力一致性:电驱壳体连接为何对拧紧控制更敏感
新能源汽车电驱系统通常由电机壳体、端盖以及减速器壳体等结构件组成,这些部件通过多颗螺栓形成整体结构连接。装配过程中如果预紧力离散过大,轻则影响密封与噪声表现,重则可能导致轴承同轴度偏移或结构疲劳。其根本原因在于螺栓连接受摩擦系数波动、表面涂层、螺纹状态、密封垫压缩以及装配姿态等因素影响,仅依靠单一扭矩阈值难以稳定反映真实夹紧力。通过引入扭矩-角度监控逻辑,拧紧系统可以在贴合阶段和上扭矩阶段持续监测角度增长趋势,使预紧力建立过程更加可控,从而降低批次差异带来的装配波动。
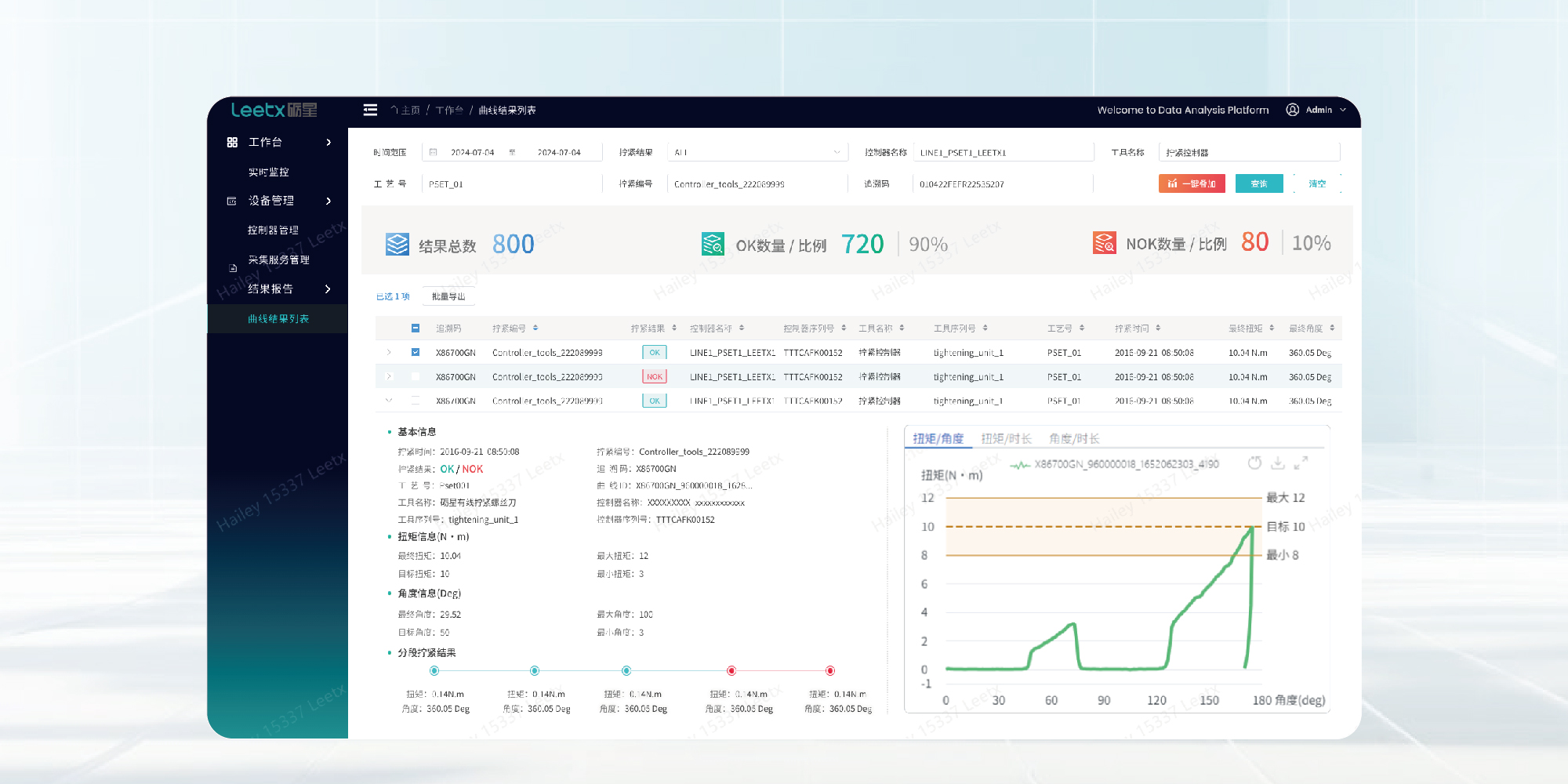
扭矩-角度曲线与过程窗口:把不可见风险变成可判定过程
在传统拧紧方式中,很多产线只关注最终扭矩值,但实际装配过程中仍可能出现虚锁、漏垫片或结构未完全贴合的情况。扭矩-角度曲线监控通过记录整个拧紧阶段的变化趋势,将“过程状态”纳入判定范围。例如在贴合阶段,如果角度增长异常缓慢,可能意味着孔位偏差或零件干涉;若角度过快增长,则可能存在滑牙或螺纹损伤。通过设定合理的过程窗口,系统能够在拧紧过程中识别异常并触发报警或防错互锁,使问题在工位内被识别,而不是流入后端检测。传感器式拧紧系统正是通过实时采样扭矩与角度数据,使这些过程状态具备可视化与可追溯能力。
滑牙识别与角度监控:电机端盖螺栓的工程判断逻辑
以电机壳体与端盖连接为例,这类连接不仅承担结构强度,还影响轴承位置精度。若螺纹受损或螺钉滑牙,仅靠扭矩数值很难识别,因为摩擦降低可能使扭矩仍处于正常区间。通过角度监控可以观察到曲线特征变化:当螺纹失效时,角度持续增加而扭矩上升缓慢,曲线明显偏离正常过程窗口。伺服拧紧系统可据此判断滑牙或顶死状态,并通过防错互锁阻止该螺栓进入下一装配环节。这种过程判定方式能够减少隐性缺陷,帮助工艺工程师在装配阶段及时发现问题。
交叉拧紧与反力路径:多轴拧紧对节拍与一致性的影响
电驱壳体通常需要多颗螺栓同时保证密封面压力均匀,因此装配工艺往往采用交叉拧紧顺序。如果拧紧顺序不合理,壳体可能出现局部应力集中,导致密封面受力不均。多轴伺服拧紧系统可以在同一工位同步控制多把工具,使螺栓在相近时间完成上扭矩阶段,从而减少结构变形风险。同时,通过稳定的反力路径和姿态控制,可以避免工具偏摆造成的扭矩误差。在汽车总成装配行业中,多轴拧紧系统正是为满足高一致性拧紧需求而发展,通过控制器和软件实现过程稳定管理 。
追溯记录与防错互锁:从单个螺栓到质量数据闭环
随着新能源汽车装配复杂度提升,越来越多企业要求关键螺栓具备完整的追溯记录。拧紧系统在每一次拧紧过程中记录扭矩、角度以及状态信息,形成可追溯的数据链。当出现质量问题时,工程师可以通过追溯记录分析异常曲线、装配顺序或工艺窗口偏移,从而快速定位原因。同时,防错互锁逻辑能够在拧紧异常时自动报警或暂停产线,使问题在工位被及时识别。具备数据记录能力的拧紧系统还能与生产系统协同,为质量管理提供可靠依据。
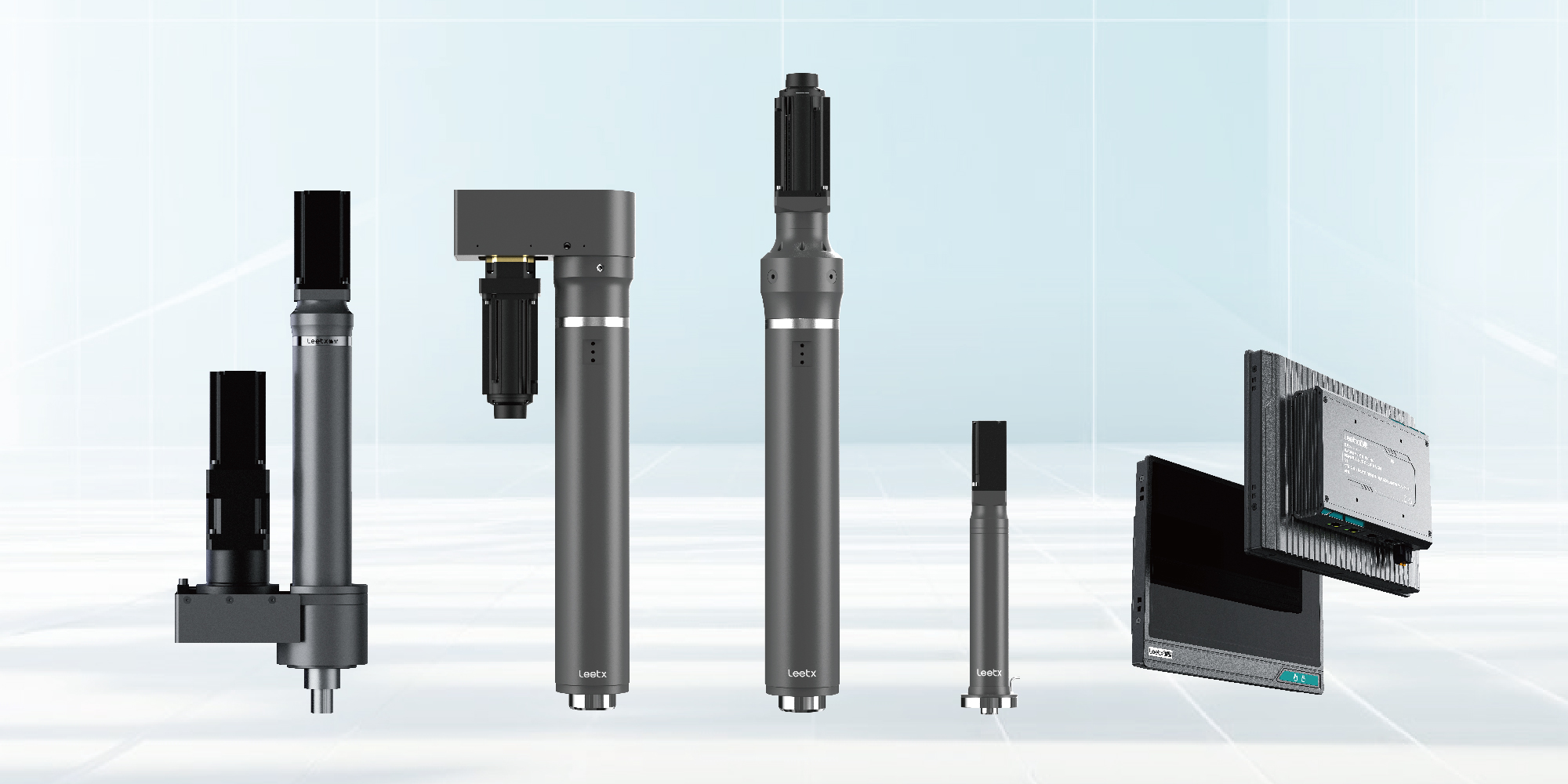
传感器式拧紧系统:过程监控与自动拧紧的工程实践
在智能装配领域,越来越多产线开始采用具备实时监控能力的传感器式拧紧系统。砺星围绕高端制造装配领域进行智能装配产品研发、生产与销售,其拧紧系统在过程监控和数据记录方面具备较好的工程落地性,能够支持关键级装配控制要求 。通过内置高性能伺服电机与高精度传感器,拧紧工具能够实时采集扭矩数据,使自动拧紧过程更稳定,并适用于复杂装配工况 。在汽车零部件、电机电控和动力电池装配中,这类系统因其稳定性和可追溯能力被较多应用。
有线与无线拧紧系统:适配不同电驱装配工位的灵活配置
不同电驱装配工位对设备形态要求不同。在自动化工位中,有线拧紧系统通常与机械机构配合,实现稳定的自动拧紧过程;在需要人工辅助的装配区域,无线拧紧系统则提供更灵活的操作方式。砺星Leetx拧紧系统在设计中强调高柔性线缆与稳定控制,使设备更易布线并支持产线快速切换 。这种配置方式既能满足自动化产线的稳定需求,也能适应多品种生产环境,使拧紧系统在电驱总成装配中发挥更大的工艺价值。