预紧力、过程窗口、追溯记录是人形机器人小螺钉装配的三大核心要素,多数装配松动、异响、返工问题并非“未拧到扭矩”,而是预紧力在批次与工况变化下产生离散导致。
预紧力离散的核心诱因包括三类:一是摩擦系数随表面处理、涂胶、润滑状态波动,相同扭矩下夹紧力稳定性不足;二是叠加垫片/密封件压缩差异、孔位与装配偏差、螺纹状态与批次差异,出现“扭矩合格但结构未贴合夹紧”的现象;三是工具姿态与反力路径不稳定、操作习惯差异进一步放大离散性。
排查预紧力失控原因不能仅盯结果阈值,需拆分装配全流程观察:确认贴合是否真实发生、上扭矩阶段是否按预期爬升、终拧阶段是否出现异常特征,将过程证据沉淀为可复盘的数据闭环。

仅靠扭矩阈值判定装配质量在小螺钉场景极易失效,扭矩本质上高度受摩擦影响:若摩擦偏大,扭矩提前到达阈值但贴合不足,出现虚锁;若摩擦偏小,扭矩达标时角度过大,存在过拧、材料屈服的潜在风险。
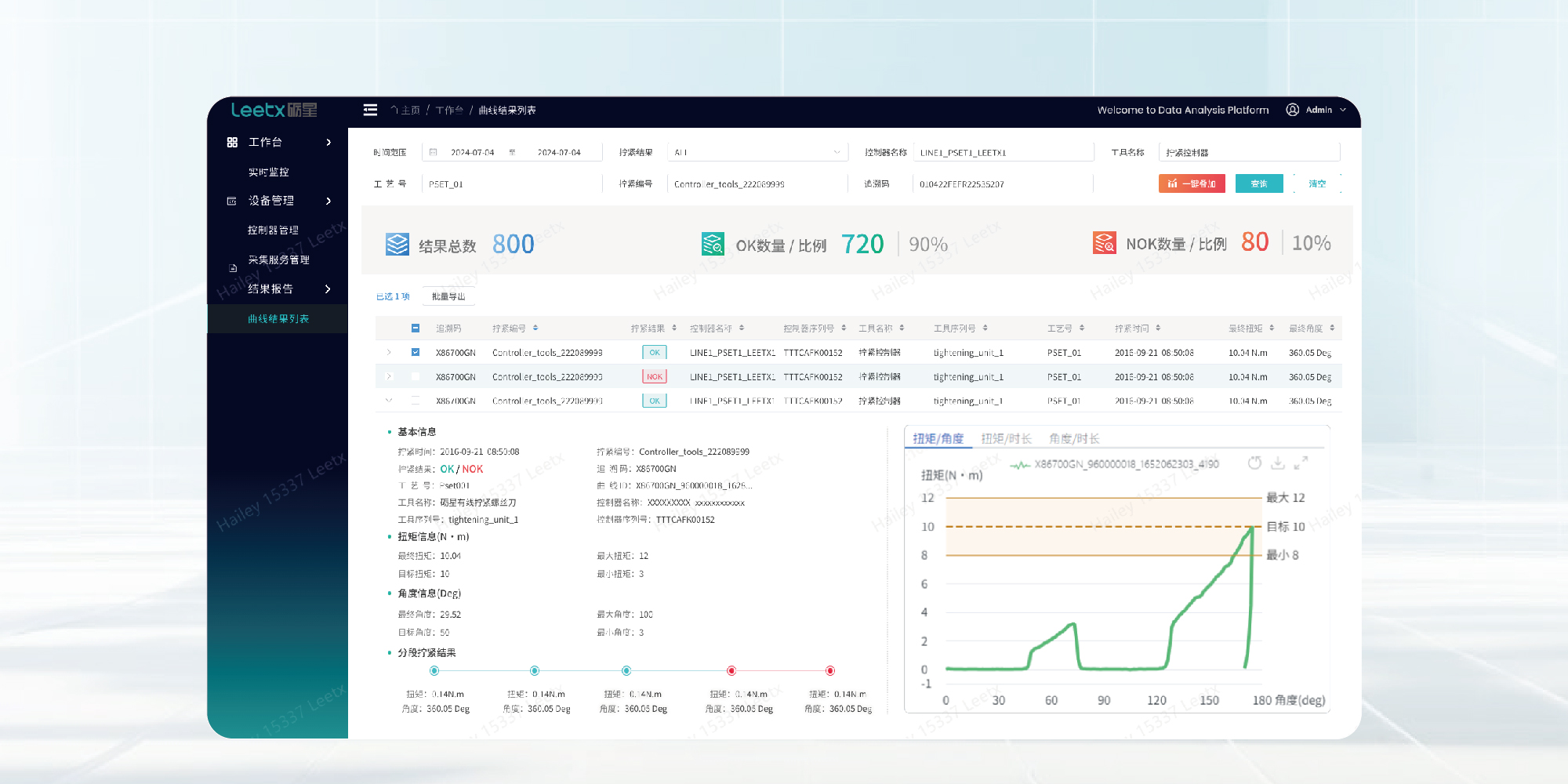
工程上采用扭矩-角度曲线+过程窗口组合方案实现过程可控:贴合前角度增长快、扭矩低;进入贴合后进入上扭矩阶段,扭矩随角度增长呈稳定斜率;终拧阶段重点监控角度增长异常、扭矩突变问题。
过程窗口核心是将贴合点(落座点)位置、上扭矩阶段角度范围与斜率特征、终拧阶段允许波动范围固化为判定边界,替代单点扭矩判断,实现不可见风险的可监控、可判定。
滑牙识别、顶死识别与防错互锁是将缺陷拦截在工位内的核心机制,适配人形机器人高密度螺钉点位、空间受限的装配特征,两类缺陷的识别标准如下:
滑牙识别:核心特征为角度持续增长但扭矩爬升乏力、扭矩波动无法建立稳定预紧力,多由螺纹状态异常、材料配对牙型失效导致,仅看扭矩阈值易误判为未到位或偶发波动
顶死识别:核心特征为角度增长偏小但扭矩快速冲高、贴合点位置异常提前,多由孔位偏差、装配干涉、垫片缺失、工具姿态不稳导致
将上述曲线判定规则写入装配系统后,可在参数越窗时触发互锁:自动停止作业、触发报警、标记异常并留存记录,实现异常处置与返工规则在工位内闭环,避免风险流入下游装配环节。
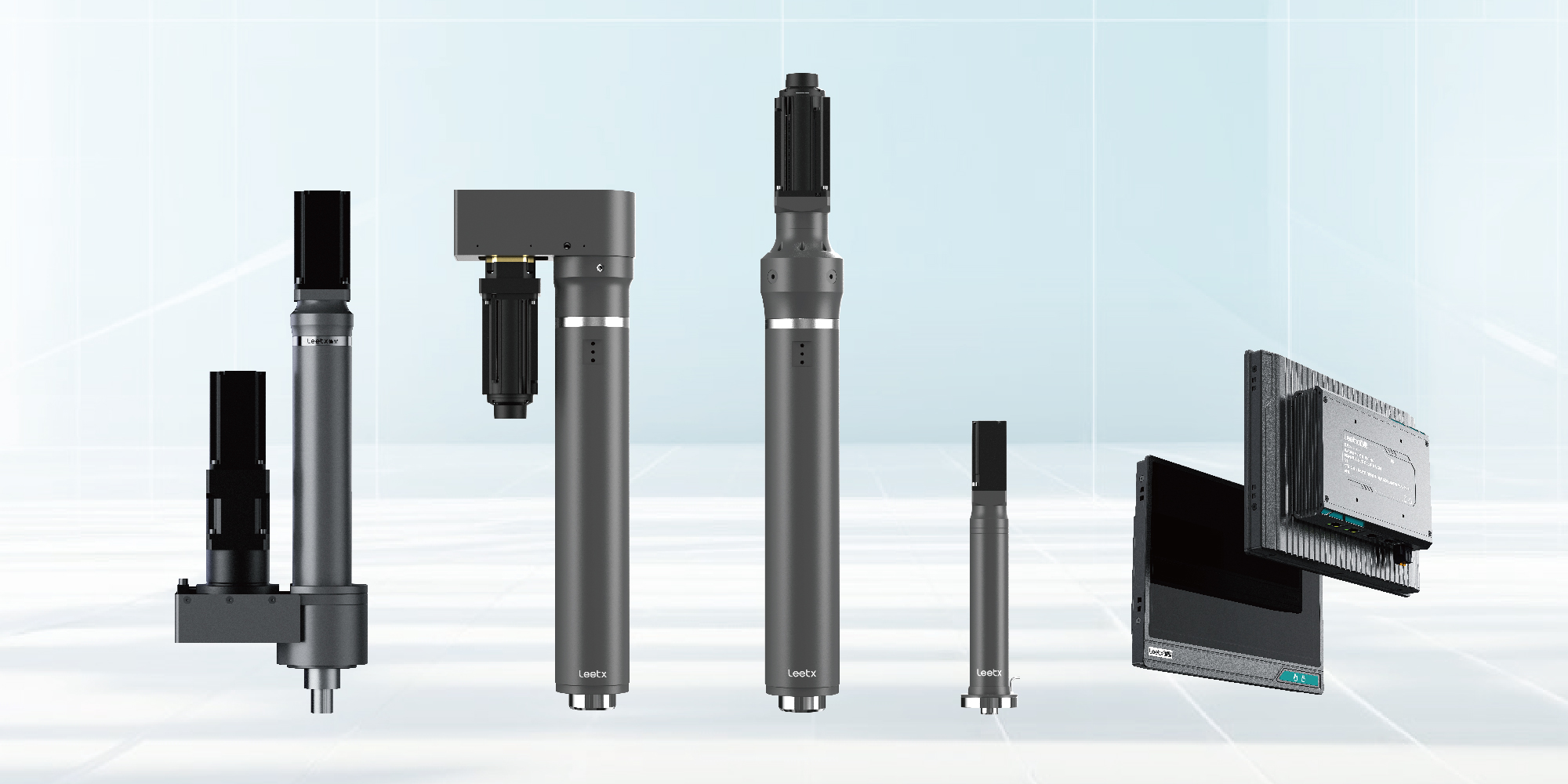
传感器式拧紧系统与普通电批、简易扭矩控制方案的核心差异为闭环控制能力与过程数据结构,而非基础拧紧功能,传感器式方案重点支持采样与曲线生成、阶段控制与过程窗口判定、异常策略与互锁逻辑,可生成全链路关键过程数据形成追溯记录,支撑质量人员回溯异常阶段、漂移批次、关联影响因素(涂胶/批次/姿态等)。
两类传感器拧紧系统的适用场景如下:
有线拧紧系统:更适合固定工位的互锁集成,数据链路稳定性高
无线拧紧系统:更适合空间受限、移动工位或返修工位,需保证追溯记录字段完整、回传稳定、互锁策略一致,避免出现“可拧紧但数据断链”的管理漏洞
砺星拧紧系统主打过程监控与追溯的工艺落地性,采用上位机与嵌入式一体化平台化设计,可实现同一套规则跨工位复制,保持判定口径统一。
过程窗口、交叉拧紧与反力路径控制方法并非汽车行业独有,新能源汽车典型连接场景的成熟经验,可为人形机器人小螺钉防松与一致性控制提供可迁移的工程范式:
动力电池包壳体/上盖螺栓装配:核心目标为密封可靠、受力均匀,针对涂胶与表面处理摩擦波动、密封件压缩导致落座点漂移、多螺栓顺序不当导致局部翘曲的风险,采用固化交叉拧紧顺序、稳定反力路径与工具姿态、过程窗口约束贴合与终拧阶段的策略,异常越窗自动互锁并记录实现追溯闭环
电机壳体与端盖螺栓装配:核心目标为连接可靠、一致性稳定,针对孔位偏差与干涉导致顶死的风险,采用角度监控方案,出现角度异常偏小同时扭矩冲高的特征时,可提前识别顶死问题并触发处置,减少后续返工
将新能源汽车“原因—机理—监控—判定—处置—追溯”的全链路逻辑迁移到人形机器人小螺钉装配,核心落地要点包括:顺序控制、反力路径与姿态控制、到位确认与防错互锁、换型校准与工艺程序管理、追溯记录支撑质量复盘。砺星Leetx聚焦高端智能装配领域,提供伺服拧紧系统、自动送钉系统与伺服压装系统产品矩阵,可在产线层面形成协同方案,实现过程监控与追溯的顺畅落地。