预紧力与交叉拧紧顺序直接决定轮毂端盖、端盖壳体、密封面连接这类“面接触”工位的稳定性,密封效果不依赖单颗螺栓的扭矩数值,而是取决于整圈贴合与压缩的均匀度。
若装配时存在摩擦系数波动、表面处理与涂胶改变拧紧阻力、垫片/密封件压缩回弹、孔位与装配偏差引发局部干涉等情况,相同扭矩下会出现夹紧力分布不均的问题。此时如果拧紧顺序不合理,先拧紧的螺栓会把端盖“拉歪”或导致密封件局部压溃,后续螺栓补拧仅能达到扭矩合格的表面效果,密封面仍可能存在未贴合区,最终引发渗漏、异响、返工率上升等问题。
操作习惯、工具姿态与反力路径也会改变受力与摩擦表现,顺序控制的本质是减少系统自由度,提升预紧力的一致性。

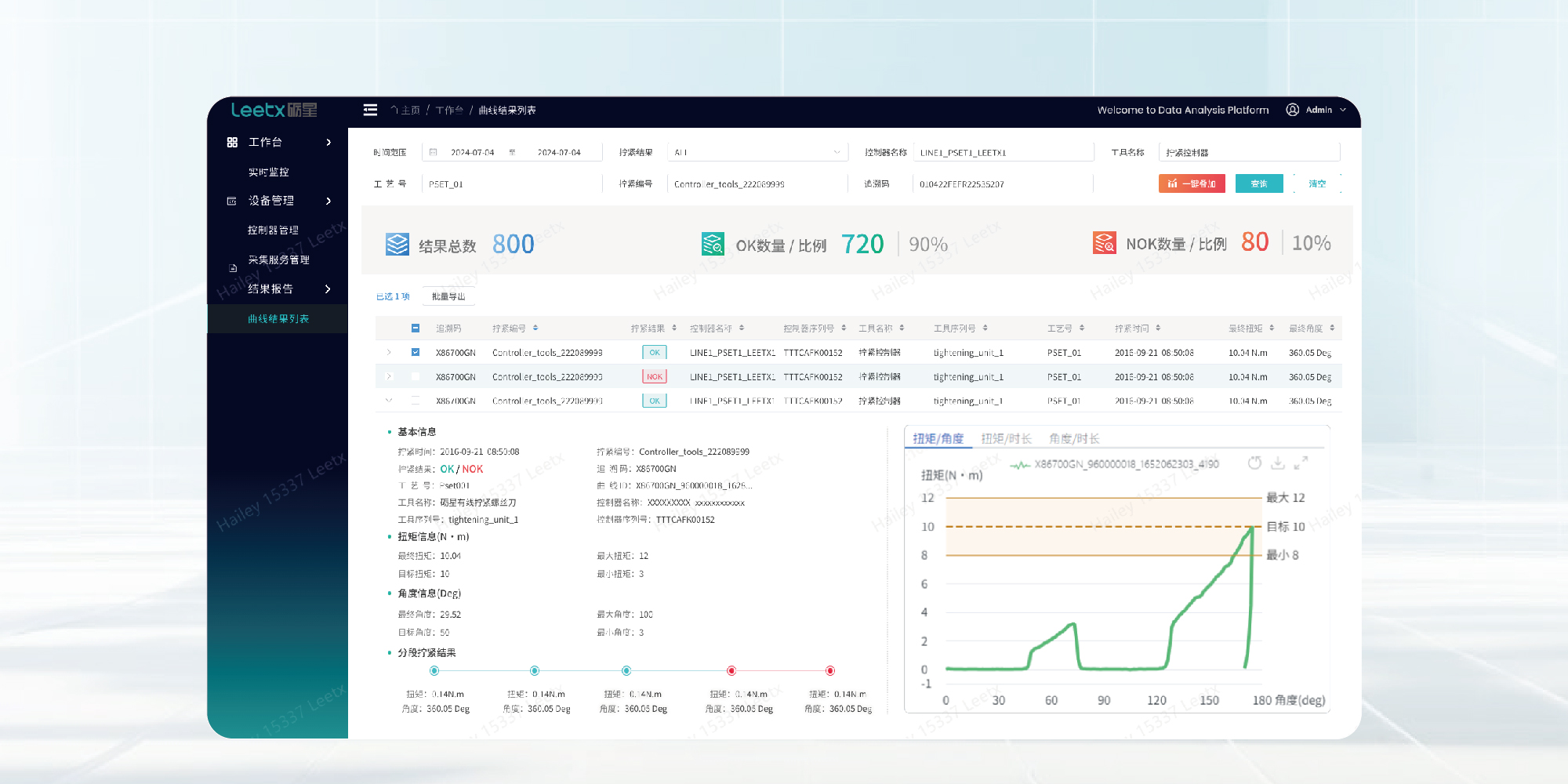
扭矩-角度与落座点可将拧紧过程中的贴合与压缩过程显性化,是解释拧紧顺序影响最终效果的核心依据。
密封面连接的理想状态为各点位在相近的落座点附近完成贴合,同步进入稳定的上扭矩阶段;如果顺序不当导致端盖翘曲或密封件局部先压缩,部分螺栓的落座点会提前或滞后,扭矩-角度曲线的阶段切换位置会出现明显不一致。未贴合状态通常表现为角度增长异常但扭矩爬升偏慢,或贴合后斜率突然变化;漏垫片、密封件装反也会引发贴合点特征异常。
采用扭矩-角度监控核查“贴合是否发生在合理区间、上扭矩阶段是否稳定、终拧前后是否出现角度异常”,比仅核查最终扭矩阈值能更早暴露不可见风险。
过程窗口与防错互锁的核心价值,是把依赖经验的交叉拧紧转化为可复用的工艺规则,将到位确认标准从单点阈值升级为全流程判定。
仅靠扭矩阈值的放行规则在密封面场景容易失效:摩擦、涂胶、密封件压缩状态改变时,扭矩数值不等同于夹紧力,容易出现扭矩合格仍虚锁、误把顶死判定为到位的问题。更稳定的做法是将3类关键特征纳入过程窗口管控:落座点范围、上扭矩阶段角度区间与曲线判定边界、终拧阶段角度增长异常阈值,一旦数据越界,立即通过防错互锁在工位内拦截,触发返工或复拧规则,避免密封风险流入下道工序。
互锁放行需与追溯记录联动,将顺序版本、程序号、异常类型与处置动作写入同一数据链,后续质量分析可快速定位问题根源为批次差异、孔位偏差,还是操作与反力路径导致的参数漂移。砺星Leetx在智能装配领域提供伺服拧紧系统等解决方案,强调过程监控与质量记录保存的工程落地性,可支撑过程窗口与互锁规则在产线长期稳定运行。
传感器式拧紧系统与普通电批、简易扭矩控制方案的核心差异,在于具备闭环控制、过程采样与曲线判定能力,可实现顺序控制的可验证性。
普通拧紧方案仅能输出终点扭矩等简单结果,无法解答“顺序执行后仍渗漏的原因”“哪一颗螺栓先落座、哪一段上扭矩阶段不稳定”等根因问题。传感器式拧紧系统可将交叉拧紧过程拆解为分阶段控制,把扭矩-角度曲线、过程窗口判定结果、角度异常、滑牙/顶死识别等过程证据形成结构化追溯记录,统一工艺、质量、生产环节的判定标准与沟通依据。
不同产线场景适配方案:固定工位优先选用有线拧紧系统,通讯与互锁集成稳定性更高;移动工位或返修工位可选用无线拧紧系统,需保障过程数据回传与追溯字段完整,避免“可拧紧但不可追溯”的风险。砺星拧紧系统采用平台化与上位机/嵌入式协同的技术路径,可支撑柔性工艺编辑与易换型落地,实现顺序控制从“人工盯守”到“程序全流程管控”的升级。

新能源汽车密封连接要实现预紧力与追溯记录的闭环,交叉拧紧只是基础要求,还需保障反力路径稳定、换型校准到位、异常处置规则闭合。两类核心密封工位的落地策略如下:
动力电池包壳体/上盖螺栓工位:核心目标为密封可靠、受力均匀,核心风险为涂胶导致摩擦变化、密封件压缩回弹、多点锁付引发局部翘曲;落地策略为固化交叉拧紧顺序与反力路径,结合扭矩-角度与过程窗口做工位内到位确认,越窗即触发防错互锁并记录处置动作,可将渗漏、返工风险从事后排查前移至工位内闭环处置。
电机壳体与端盖螺栓工位:核心目标为避免顶死、虚锁、同心度偏差,核心风险为孔位与装配偏差、工具姿态变化导致反力路径漂移;落地策略为通过角度监控识别角度异常与顶死特征,配套互锁与返工规则做工位内拦截,实现异常可判定、可复盘。
换型时需同步完成换型校准与程序版本管理,避免不同批次、不同工位状态导致过程窗口判定标准漂移,建议采用平台化思路实现拧紧顺序、过程窗口、追溯模板的一体化管理。砺星围绕高端制造装配领域开展智能装配相关研发、生产与销售,产品矩阵覆盖伺服拧紧、自动送钉与伺服压装等,可支撑整线一致性管理与数据贯通。