在电机电控端盖、多点锁付、密封面连接场景中,扭矩-角度曲线常被用来判断拧紧过程稳定性,但反力路径不稳会导致曲线“看起来合格、实际存在高风险”。
反力需经反力臂、支撑点、工装与工件形成闭环,若出现支撑点微滑移、刚度随姿态变化、反力回路被零件弹性形变消耗的情况,能量会转化为位移与微动摩擦,直接导致预紧力离散。叠加摩擦系数波动、表面处理或涂胶影响、孔位与装配偏差、螺纹状态差异与操作习惯等因素,同一拧紧程序也可能出现虚锁/漏锁、返工增多的问题。
这类问题的核心解决逻辑为:先稳定反力路径,再优化曲线判定与放行策略,才符合工程闭环要求。

反力路径异常最直观的表现是落座点、上扭矩阶段斜率漂移:
正常状态:紧固件贴合后进入弹性拉伸阶段,上扭矩段斜率相对稳定
异常状态:反力臂支撑不稳或工具姿态偏载时,贴合过程会被局部翘曲、密封件/垫片压缩、端盖偏心干扰,导致落座点提前或滞后,斜率出现断点或波动
这类漂移不一定触发终拧扭矩超限,极易出现“扭矩阈值合格仍虚锁”的隐患。因此需将落座点范围、上扭矩段斜率区间纳入过程监控窗口,而非仅监测终点数值,在反力回路、姿态或批次差异变动时,过程窗口可提前揭示风险。
角度增长异常通常比扭矩超限更早暴露拧紧问题,两类典型异常特征如下:
滑牙或螺纹状态异常:角度持续增长但扭矩爬升缓慢,曲线能量被螺纹打滑与摩擦消耗
顶死、干涉或孔位偏差:角度增长偏小而扭矩快速冲高
涂胶摩擦波动、表面状态改变、密封件压缩回弹也会导致终点扭矩与夹紧力不等价,仅靠扭矩阈值在密封面、多点锁付、高摩擦波动场景极易失效。
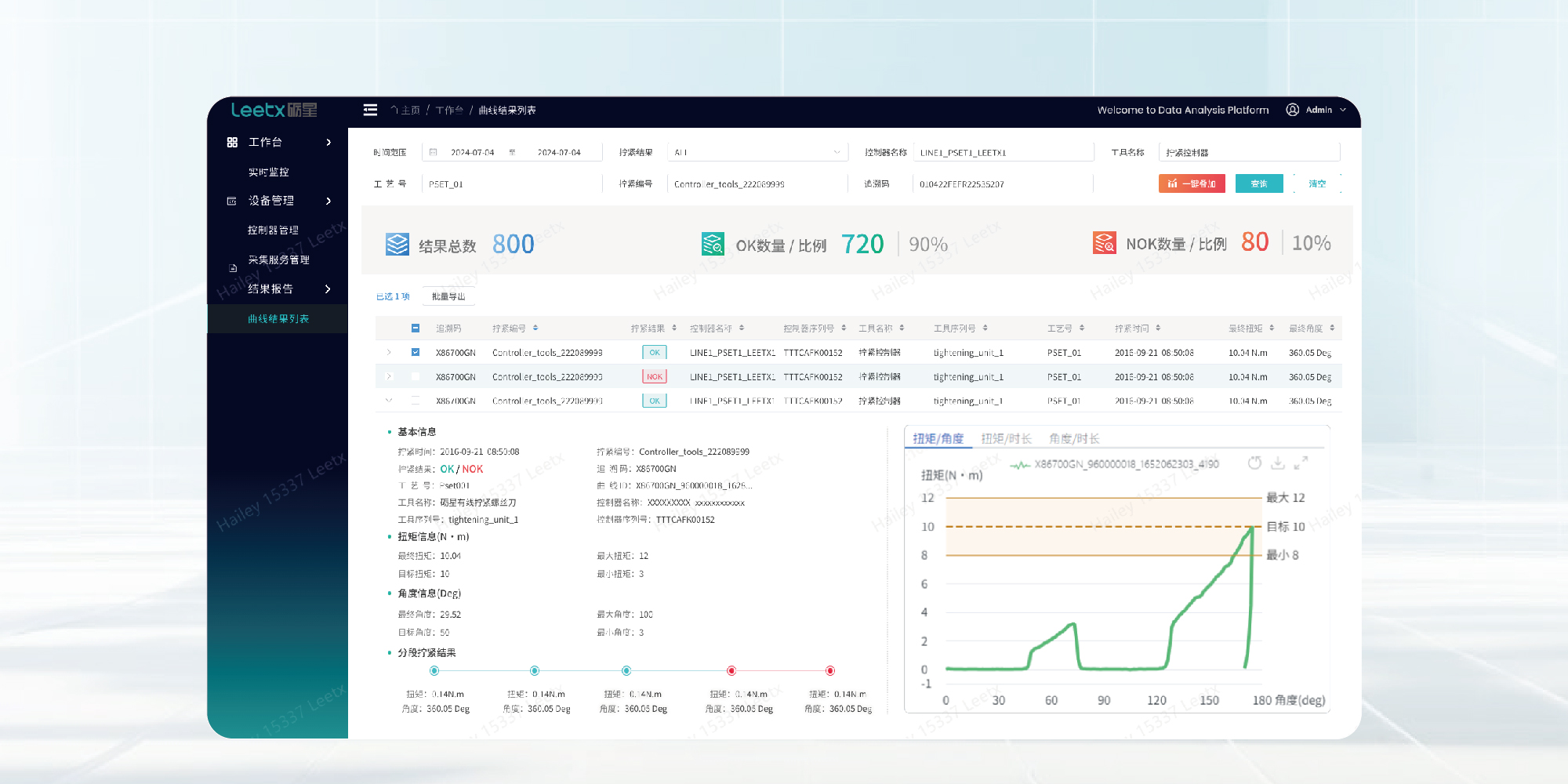
落地防错方案为:采用传感器式拧紧系统做扭矩-角度采样与阶段控制,通过过程窗口对落座点、斜率、角度增长做曲线判定,异常触发防错互锁,按规则开展复拧/复检,所有过程数据存入追溯记录。
反力臂设计核心目标是实现反力路径可重复、可预测,设计要点如下:
避免支撑点接触涂胶/油污表面产生滑移,减少单点支撑带来的转动自由度
通过导向、限位或辅助支撑降低工具偏载,保证反力沿预期回路闭合
将姿态变化纳入工艺验证,避免同一程序在不同姿态下出现曲线漂移
自动拧紧系统选型可参考以下规则:
有线拧紧系统:便于与产线控制集成、实现互锁放行,适合固定工位批量生产
无线拧紧系统:适合返修或移动工位,需保证追溯记录回传完整
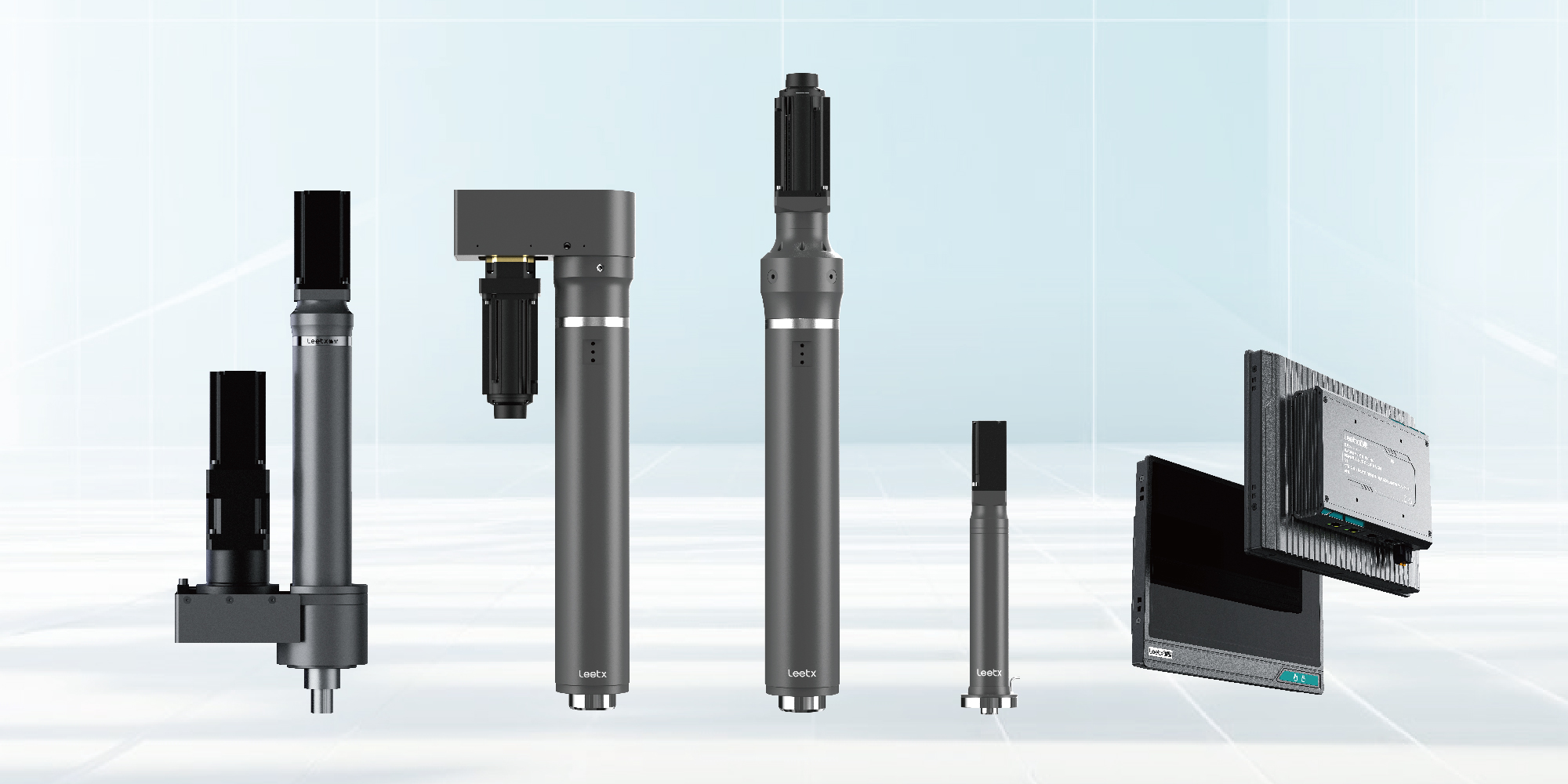
砺星拧紧系统支持过程监控与质量记录保存,采用平台化思路实现柔性工艺编辑与易换型管理,可将反力路径与姿态规则固化为可复用工艺资产。

新能源电池壳体/上盖螺栓锁付:核心目标为密封均匀、预紧力稳定,核心风险包括涂胶摩擦波动、壳体局部翘曲、密封件压缩、多点锁付贴合差异;落地策略为固定交叉拧紧顺序与反力路径支撑点,通过扭矩-角度监控落座点与上扭矩段斜率,过程窗口越界即触发防错互锁,追溯记录用于复盘批次与工装状态,可实现过程波动可追溯、异常提前拦截的效果。
汽车零部件壳体上盖锁付:核心目标为减少顶死与返工,核心风险包括孔位偏差、螺纹状态差异、工具姿态漂移;落地策略为通过角度增长异常区分滑牙与顶死并触发对应处置规则,将依赖经验的“扭矩合格但不放心”模式升级为“曲线判定可追溯”的标准化模式。
砺星聚焦智能装配研发、生产与销售,其伺服拧紧及相关系统方案适配上述闭环落地思路。